强化学习从基础到进阶-案例与实践[5.1]:Policy Gradient策略梯度-Cart pole游戏展示
强化学习(Reinforcement learning,简称RL)是机器学习中的一个领域,区别与监督学习和无监督学习,强调如何基于环境而行动,以取得最大化的预期利益。基本操作步骤:智能体agent在环境environment中学习,根据环境的状态state(或观测到的observation),执行动作action,并根据环境的反馈reward(奖励)来指导更好的动作。比如本项目的Cart pole小游戏中,agent就是动图中的杆子,杆子有向左向右两种action。
1.Policy Gradient简介
在强化学习中,有两大类方法,一种基于值(Value-based),一种基于策略(Policy-based)
Value-based的算法的典型代表为Q-learning和SARSA,将Q函数优化到最优,再根据Q函数取最优策略。Policy-based的算法的典型代表为Policy Gradient,直接优化策略函数。采用神经网络拟合策略函数,需计算策略梯度用于优化策略网络。
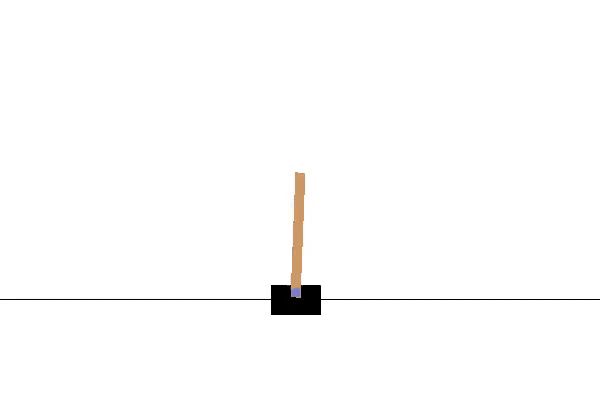
优化的目标是在策略π(s,a)的期望回报:所有的轨迹获得的回报R与对应的轨迹发生概率p的加权和,当N足够大时,可通过采样N个Episode求平均的方式近似表达。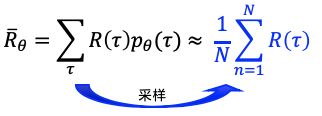
!pip install pygame !pip install gym !pip install atari_py !pip install parl
import gym import os import random import collections import paddle import paddle.nn as nn import numpy as np import paddle.nn.functional as F
2.模型Model
这里的模型可以根据自己的需求选择不同的神经网络组建。
PolicyGradient用来定义前向(Forward)网络,可以自由的定制自己的网络结构。
class PolicyGradient(nn.Layer): def __init__(self, act_dim): super(PolicyGradient, self).__init__() act_dim = act_dim hid1_size = act_dim * 10 self.linear1 = nn.Linear(in_features=4, out_features=hid1_size) self.linear2 = nn.Linear(in_features=hid1_size, out_features=act_dim) def forward(self, obs): out = self.linear1(obs) out = paddle.tanh(out) out = self.linear2(out) out = F.softmax(out) return out
3.智能体Agent的学习函数
这里包括模型探索与模型训练两个部分
Agent负责算法与环境的交互,在交互过程中把生成的数据提供给Algorithm来更新模型(Model),数据的预处理流程也一般定义在这里。
def sample(obs, MODEL): global ACTION_DIM obs = np.expand_dims(obs, axis=0) obs = paddle.to_tensor(obs, dtype='float32') act = MODEL(obs) act_prob = np.squeeze(act, axis=0) act = np.random.choice(range(ACTION_DIM), p=act_prob.numpy()) return act def learn(obs, action, reward, MODEL): obs = np.array(obs).astype('float32') obs = paddle.to_tensor(obs) act_prob = MODEL(obs) action = paddle.to_tensor(action.astype('int32')) log_prob = paddle.sum(-1.0 * paddle.log(act_prob) * F.one_hot(action, act_prob.shape[1]), axis=1) reward = paddle.to_tensor(reward.astype('float32')) cost = log_prob * reward cost = paddle.sum(cost) opt = paddle.optimizer.Adam(learning_rate=LEARNING_RATE, parameters=MODEL.parameters()) cost.backward() opt.step() opt.clear_grad() return cost.numpy()
4.模型梯度更新算法
def run_train(env, MODEL): MODEL.train() obs_list, action_list, total_reward = [], [], [] obs = env.reset() while True: obs_list.append(obs) action = sample(obs, MODEL) action_list.append(action) obs, reward, isOver, info = env.step(action) total_reward.append(reward) if isOver: break return obs_list, action_list, total_reward def evaluate(model, env, render=False): model.eval() eval_reward = [] for i in range(5): obs = env.reset() episode_reward = 0 while True: obs = np.expand_dims(obs, axis=0) obs = paddle.to_tensor(obs, dtype='float32') action = model(obs) action = np.argmax(action.numpy()) obs, reward, done, _ = env.step(action) episode_reward += reward if render: env.render() if done: break eval_reward.append(episode_reward) return np.mean(eval_reward)
5.训练函数与验证函数
设置超参数
LEARNING_RATE = 0.001 OBS_DIM = None ACTION_DIM = None def calc_reward_to_go(reward_list, gamma=1.0): for i in range(len(reward_list) - 2, -1, -1): reward_list[i] += gamma * reward_list[i + 1] return np.array(reward_list) def main(): global OBS_DIM global ACTION_DIM train_step_list = [] train_reward_list = [] evaluate_step_list = [] evaluate_reward_list = [] env = gym.make('CartPole-v0') action_dim = env.action_space.n obs_dim = env.observation_space.shape[0] OBS_DIM = obs_dim ACTION_DIM = action_dim max_score = -int(1e4) MODEL = PolicyGradient(ACTION_DIM) TARGET_MODEL = PolicyGradient(ACTION_DIM) print("start training...") for i in range(1000): obs_list, action_list, reward_list = run_train(env, MODEL) if i % 10 == 0: print("Episode {}, Reward Sum {}.".format(i, sum(reward_list))) batch_obs = np.array(obs_list) batch_action = np.array(action_list) batch_reward = calc_reward_to_go(reward_list) cost = learn(batch_obs, batch_action, batch_reward, MODEL) if (i + 1) % 100 == 0: total_reward = evaluate(MODEL, env, render=False) print("Test reward: {}".format(total_reward)) if __name__ == '__main__': main()
W0630 11:26:18.969960 322 gpu_resources.cc:61] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 11.2 W0630 11:26:18.974581 322 gpu_resources.cc:91] device: 0, cuDNN Version: 8.2. start training... Episode 0, Reward Sum 37.0. Episode 10, Reward Sum 27.0. Episode 20, Reward Sum 32.0. Episode 30, Reward Sum 20.0. Episode 40, Reward Sum 18.0. Episode 50, Reward Sum 38.0. Episode 60, Reward Sum 52.0. Episode 70, Reward Sum 19.0. Episode 80, Reward Sum 27.0. Episode 90, Reward Sum 13.0. Test reward: 42.8 Episode 100, Reward Sum 28.0. Episode 110, Reward Sum 44.0. Episode 120, Reward Sum 30.0. Episode 130, Reward Sum 28.0. Episode 140, Reward Sum 27.0. Episode 150, Reward Sum 47.0. Episode 160, Reward Sum 55.0. Episode 170, Reward Sum 26.0. Episode 180, Reward Sum 47.0. Episode 190, Reward Sum 17.0. Test reward: 42.8 Episode 200, Reward Sum 23.0. Episode 210, Reward Sum 19.0. Episode 220, Reward Sum 15.0. Episode 230, Reward Sum 59.0. Episode 240, Reward Sum 59.0. Episode 250, Reward Sum 32.0. Episode 260, Reward Sum 58.0. Episode 270, Reward Sum 18.0. Episode 280, Reward Sum 24.0. Episode 290, Reward Sum 64.0. Test reward: 116.8 Episode 300, Reward Sum 54.0. Episode 310, Reward Sum 28.0. Episode 320, Reward Sum 44.0. Episode 330, Reward Sum 18.0. Episode 340, Reward Sum 89.0. Episode 350, Reward Sum 26.0. Episode 360, Reward Sum 57.0. Episode 370, Reward Sum 54.0. Episode 380, Reward Sum 105.0. Episode 390, Reward Sum 56.0. Test reward: 94.0 Episode 400, Reward Sum 70.0. Episode 410, Reward Sum 35.0. Episode 420, Reward Sum 45.0. Episode 430, Reward Sum 117.0. Episode 440, Reward Sum 50.0. Episode 450, Reward Sum 35.0. Episode 460, Reward Sum 41.0. Episode 470, Reward Sum 43.0. Episode 480, Reward Sum 75.0. Episode 490, Reward Sum 37.0. Test reward: 57.6 Episode 500, Reward Sum 40.0. Episode 510, Reward Sum 85.0. Episode 520, Reward Sum 86.0. Episode 530, Reward Sum 30.0. Episode 540, Reward Sum 68.0. Episode 550, Reward Sum 25.0. Episode 560, Reward Sum 82.0. Episode 570, Reward Sum 54.0. Episode 580, Reward Sum 53.0. Episode 590, Reward Sum 58.0. Test reward: 147.2 Episode 600, Reward Sum 24.0. Episode 610, Reward Sum 78.0. Episode 620, Reward Sum 62.0. Episode 630, Reward Sum 58.0. Episode 640, Reward Sum 50.0. Episode 650, Reward Sum 67.0. Episode 660, Reward Sum 68.0. Episode 670, Reward Sum 51.0. Episode 680, Reward Sum 36.0. Episode 690, Reward Sum 69.0. Test reward: 84.2 Episode 700, Reward Sum 34.0. Episode 710, Reward Sum 59.0. Episode 720, Reward Sum 56.0. Episode 730, Reward Sum 72.0. Episode 740, Reward Sum 28.0. Episode 750, Reward Sum 35.0. Episode 760, Reward Sum 54.0. Episode 770, Reward Sum 61.0. Episode 780, Reward Sum 32.0. Episode 790, Reward Sum 147.0. Test reward: 123.0 Episode 800, Reward Sum 129.0. Episode 810, Reward Sum 65.0. Episode 820, Reward Sum 73.0. Episode 830, Reward Sum 54.0. Episode 840, Reward Sum 60.0. Episode 850, Reward Sum 71.0. Episode 860, Reward Sum 54.0. Episode 870, Reward Sum 74.0. Episode 880, Reward Sum 34.0. Episode 890, Reward Sum 55.0. Test reward: 104.8 Episode 900, Reward Sum 41.0. Episode 910, Reward Sum 111.0. Episode 920, Reward Sum 33.0. Episode 930, Reward Sum 49.0. Episode 940, Reward Sum 62.0. Episode 950, Reward Sum 114.0. Episode 960, Reward Sum 52.0. Episode 970, Reward Sum 64.0. Episode 980, Reward Sum 94.0. Episode 990, Reward Sum 90.0. Test reward: 72.2
项目链接fork一下即可运行
https://www.heywhale.com/mw/project/649e7dc170567260f8f12d54
更多优质内容请关注公号:汀丶人工智能